Software Optimization for Edge Computing Lab is involved in the following projects.
Real-Time Automatic Object Recognition (AOR) With Edge Capability
The project aims to develop a real-time computer vision system for automatic object recognition and tracking, leveraging machine learning techniques. Using the Jetson Orin edge computing device, the system offers significant advantages, including automatic object identification to reduce human error and reaction time, real-time tracking for continuous awareness of target movement, and edge computing capabilities to ensure low latency and data privacy through on-device processing. This approach enhances operational efficiency and reliability, making it ideal for various applications requiring precise and immediate target recognition and tracking.
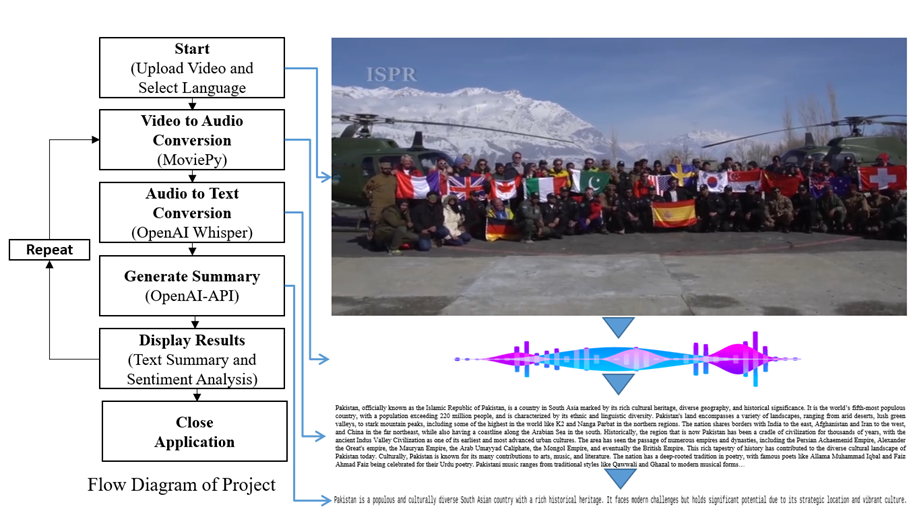
Real-time Video Transcription and Sentiment Analysis for Unprecedented Monitoring in Media
An AI-Powered, Fast, and Cost-Effective Solution for Converting Video Content into Summarized Text with Sentiment Analysis. Leveraging Cutting-Edge Speech-to-Text and Text Summarization Technologies, it Offers a Valuable Resource for Swift and Affordable Content Analysis in Various Fields, including Media.
AI-Powered Web Link Analyzer
AI-Powered Web Link Analyzer focuses on extracting and analyzing web content through web scraping, encompassing diverse website structures or various website formats. The system adeptly cleans and preprocesses raw data using NLP, providing comprehensive website summaries and insightful sentiment analyses.
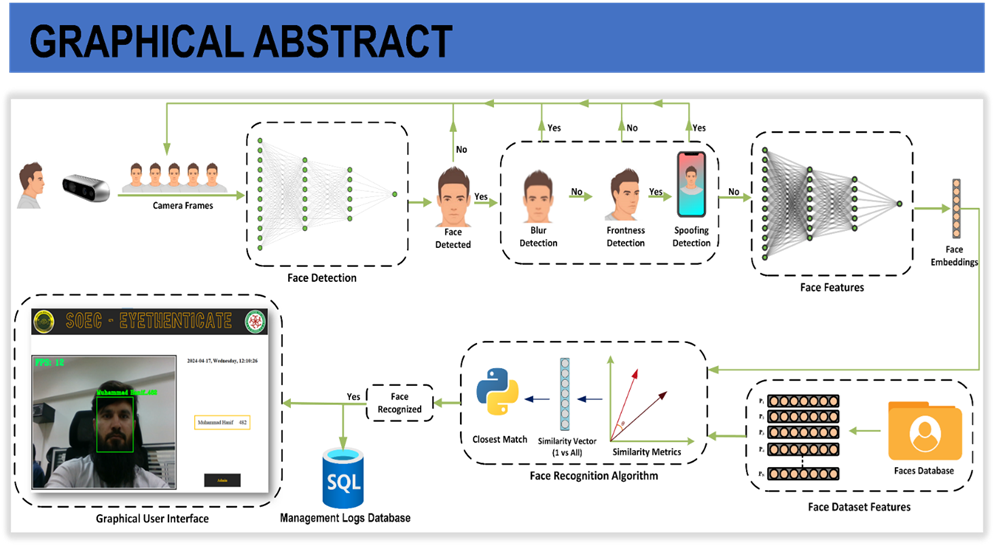
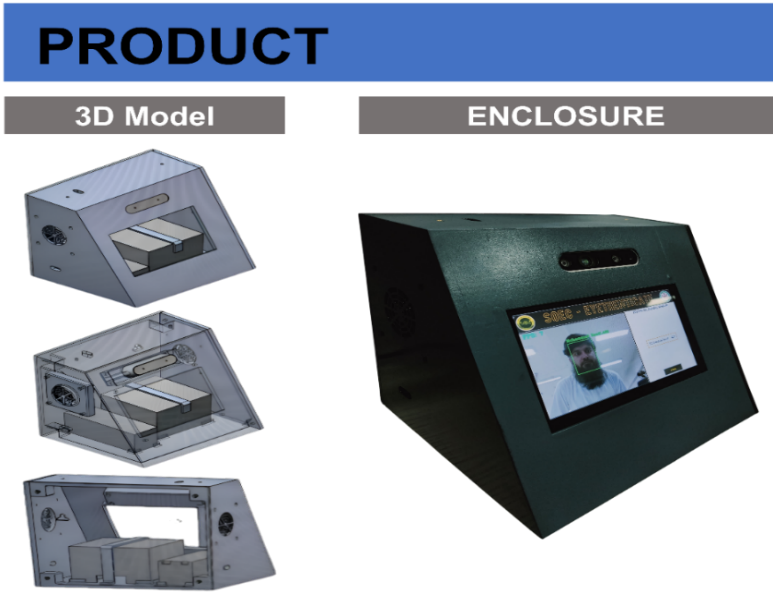
Visual Attendance System
The demand for secure and efficient identification systems has driven advancements in facial recognition technology. Traditional methods often struggle with image quality, spoofing attacks, alignment issues, and computational inefficiencies. The "Visual Attendance System" addresses these challenges by integrating advanced AI technologies for robust face detection and recognition, optimized for edge deployment on customized hardware with secure enclosures. Utilizing FaceBoxes for real-time detection, Laplacian variance for blur detection, and facial landmarks for orientation, the system ensures precise and efficient performance. An anti-spoofing mechanism using depth information and mathematical modeling enhances security. FaceNet512 generates high-dimensional embeddings for accurate recognition, with comparisons made using Cosine Similarity. Specialized hardware boost performance, making this AI-powered solution ideal for secure, scalable, and real-time face authentication applications, setting a new standard for identification systems.
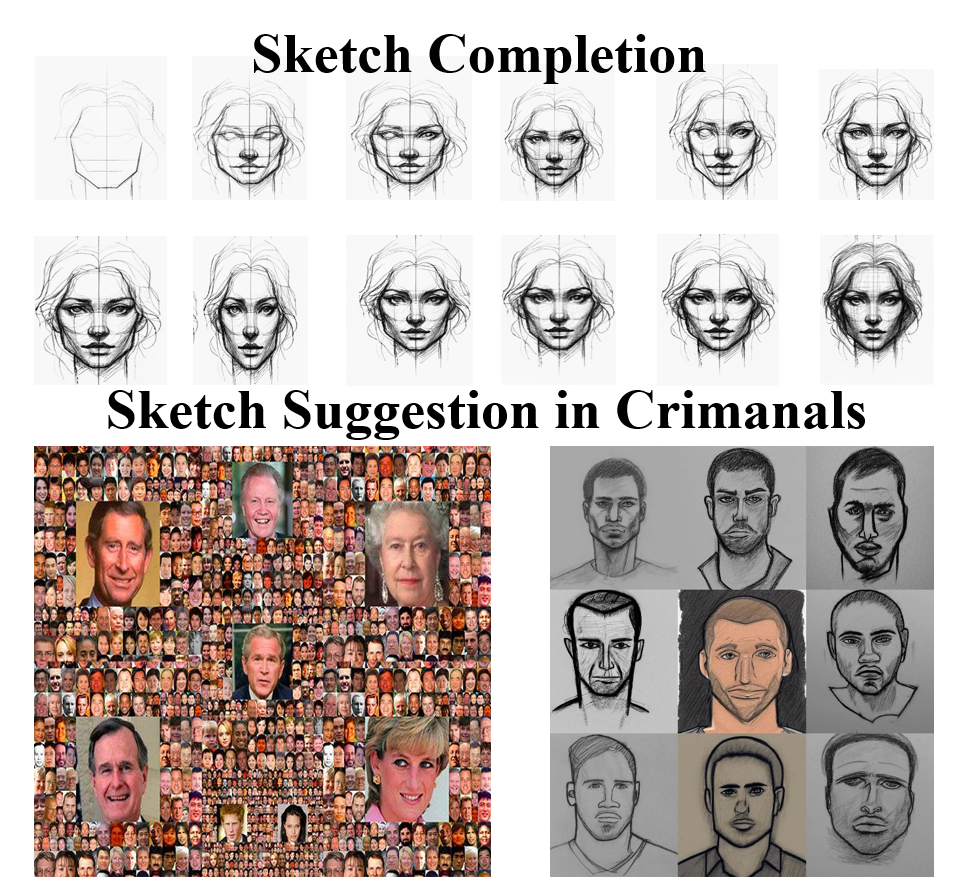
Sketch Based Image Retrieval System
Sketch-Based Image Retrieval (SBIR) revolutionizes visual interactions by seamlessly connecting hand-drawn sketches and digital images through AI, enabling users to input sketches for efficient retrieval of visually similar images from extensive databases.
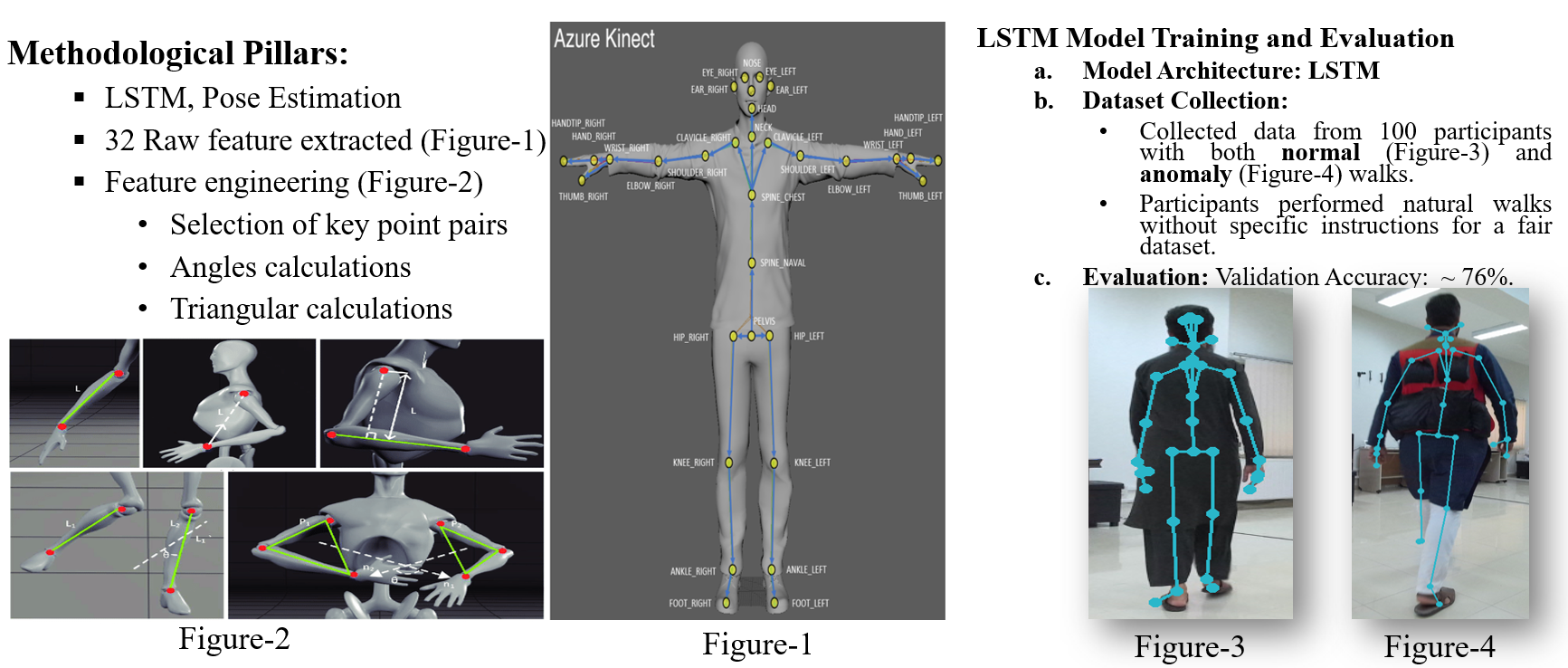
Suspicious Person Detection using AI-Powered Body Pose Analysis
The primary objective is the early detection of potential threats, specifically focusing on suspicious persons detection.
- Public Safety and Technology: In the pursuit of public safety, the integration of technology is paramount.
- AI-Powered Azure Kinect and LSTM Unleashed: This presentation delves deep into the extraordinary fusion of Azure Kinect body Tracking and LSTM (Long Short-Term Memory) networks, crafting an AI-powered solution that redefines threat detection dynamics.
- Methodological Pillars: The approach involves advanced feature extraction, LSTM model training, and real-time classification systems. Discover how these pillars form the foundation of innovation in threat detection.
- Innovation in Threat Detection: By exploring the nuances of body pose analysis, this research pioneers a sophisticated method for threat detection.
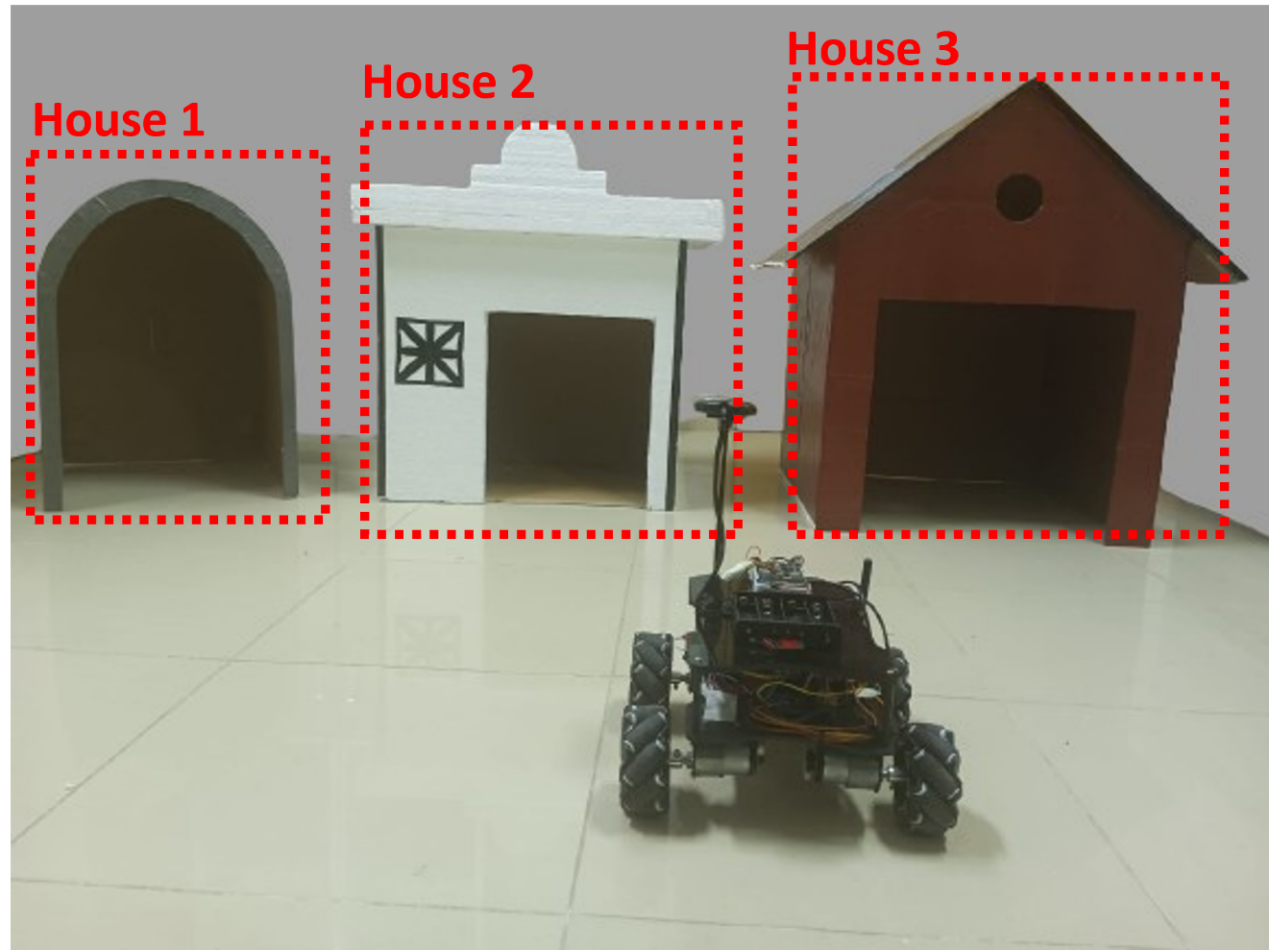
Automatic Car Parking
This project focuses on developing a comprehensive system for autonomous vehicle navigation in parking environments. It begins with the creation of a digital model of the parking area and the labeling of data for training. The input data undergoes preprocessing through cleaning, normalizing, and augmenting. A house detection model using deep learning techniques like CNNs is then developed to identify key elements in the environment. The system also includes target locking for selecting and tracking destinations, such as parking spaces or garage entrances, and path planning to determine the optimal route for efficient and obstacle-free navigation.
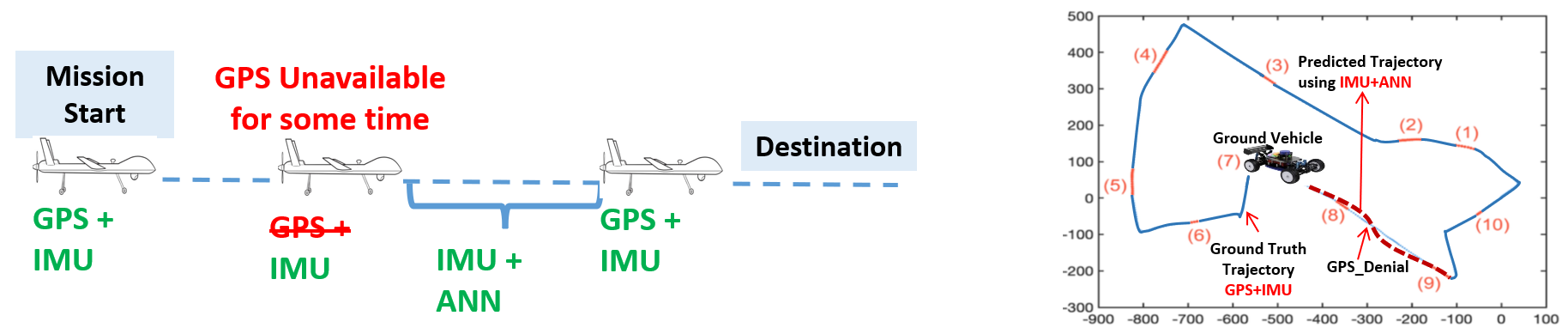
Deployment of Unmanned Aerial Vehicles (UAV’s)/UGV’s Trajectory Prediction in GPS-Denied Mode
Deploying operations in GPS-denied environments presents significant challenges, potentially leading to mission aborts. To overcome this hurdle, a novel sensor fusion approach is implemented, integrating an AI-based Long Short-Term Memory (LSTM) prediction model with an Extended Kalman Filter (EKF). This fusion enhances path prediction and mitigates mission termination risks. The system showcases autonomous navigation with waypoint missions, demonstrating a rover's capacity for independent navigation. Amid GPS denial, collaboration between the EKF and an Inertial Measurement Unit (IMU) ensures continuous path prediction and seamless mission resumption upon GPS recovery. This technology is pivotal for trajectory prediction in both Unmanned Aerial Vehicles (UAVs) and Unmanned Ground Vehicles (UGVs) operating in GPS-denied modes on edge platforms.
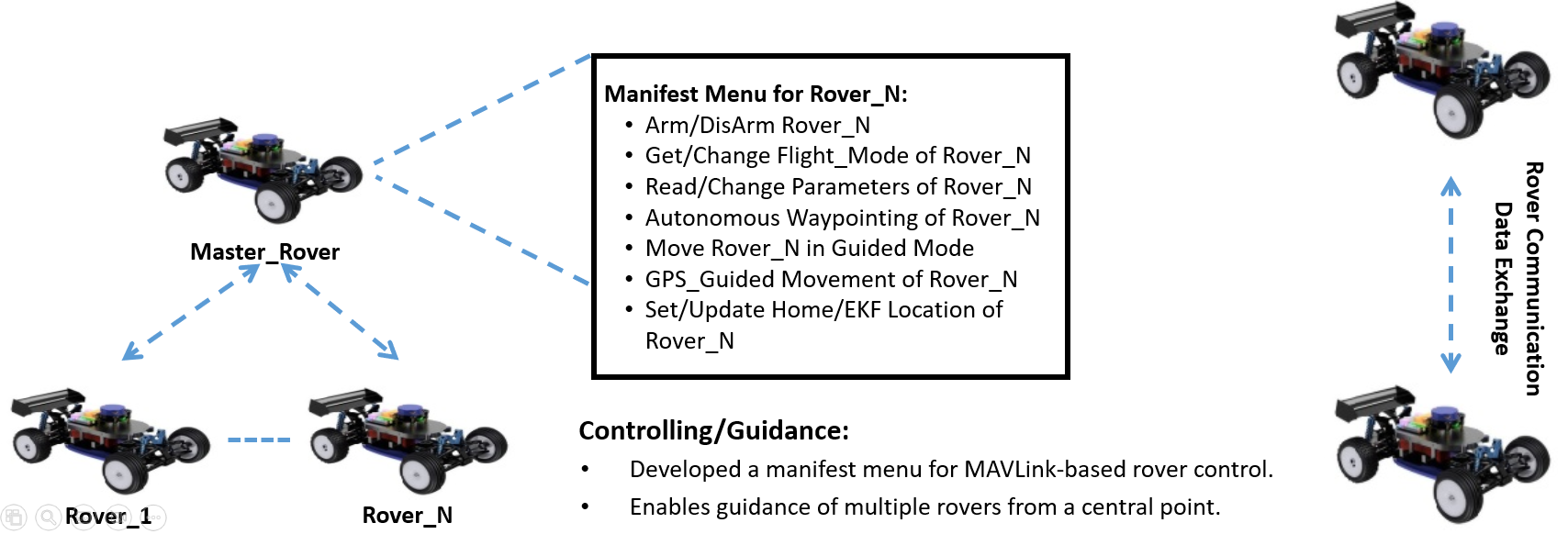
Swarm Communication & Control
DeployinSwarm communication and control are essential components for coordinating multiple rovers efficiently. Inter-rover communication is established through ROS2/MQTT over a Wi-Fi router, enabling seamless data exchange among various sensors, including GPS and IMU. For controlling and guidance, a manifest menu has been developed for MAVLink-based rover control. This menu facilitates the guidance of multiple rovers from a central point, enhancing coordination and enabling efficient deployment of swarm robotics systems